【PR】この記事には広告が含まれています。
ラズベリーパイでカメラを使用するときに必要なライブラリーである「OpenCV」。これまで何度もインストールしてきたのですが、できるだけスムーズにインストールする方法を研究しましたので、解説します。
pipを最新にする
ライブラリーをインストールする作業は、ターミナルを使用します。
まず、「XLTerminal」を開いてください。
以下のコマンドを入力してEnterキーを押します。
sudo python -m pip install --upgrade pipこれを実行すると、pipが最新のバージョンになります。
OpenCVをインストールする
以下のコマンドを入力してEnterキーを押します。
sudo pip3 install opencv-python==4.5.1.48最新のバージョンだとエラーが出たので、バージョン指定でインストールします。
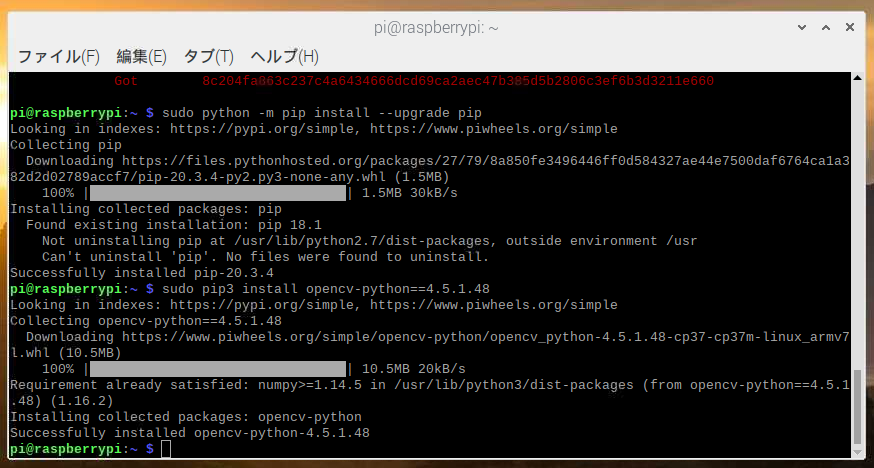
上の画像のように「Successfully installed~」が出ればインストール成功です。
「libatlas3-base」 パッケージをインストールする
「libatlas3-base」 パッケージをインストール しないと、importしたときにエラーが出てしまいます。
まず、パッケージリストを最新にしておきます。
以下のコマンドを入力してEnterキーを押します。
sudo apt-get update以下のコマンドを入力してEnterキーを押します。
sudo apt-get install libatlas3-base以上でOpenCVのインストールは完了です。
OpenCVが問題なく使えるか確認する
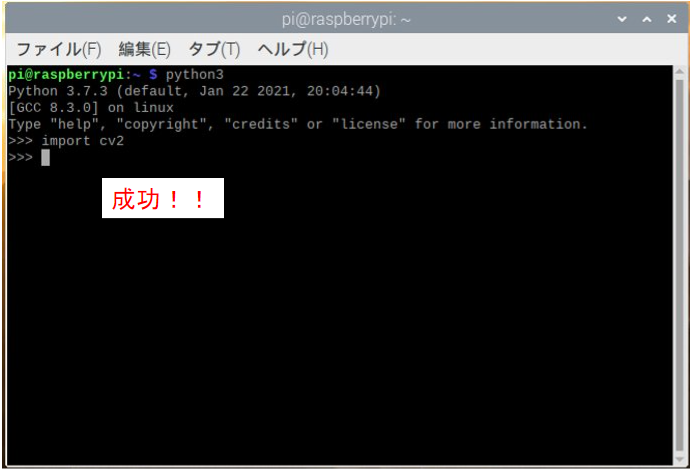
ターミナルで「python3」と入力してEnterを押す。
python3「import cv2」 を入力してEnterを押す。
import cv2エラーが出なければ成功です。
カメラの映像を表示する方法は以下の記事で詳しく解説しています。
≫ 監視カメラの作り方|Python使用
コメント一覧
返信ありがとうございました。
上手くいきました。
ご連絡が大変遅れてすみません。
また一歩々々進んでいきたいです。
すみません、最初の
sudo pip3 install opencv-python==4.5.1.48
からエラーが出ます。
(ERROR: Could not find a version that satisfies the requirement opencv-python-4.5.1.48 ERROR: No matching distribution found for opencv-python==4.5.1.58 というエラーです)
公式ホームページで明記されている他バージョン(4.5.4や4.5.5)でも試しましたが同じエラー文でした。
sudo apt install python3-opencv
も試してみましたが、アクセスエラー(Failed to fetch http://raspbian.raspberrypi.org/raspbian/pool/main/g/gdal/gdal -data 3.2.2%2bdfsg-2%2bdeb11u2_all.deb Temporary failure resolving ‘raspbian.ras pberrypi.org)が出てしまいます。
機種はradpberry pi zero wで、osはRaspberry Pi OS (Legacy)です。
何かヒントをご存じではないでしょうか。お助けいただけますと幸いです。
お問い合わせありがとうございます。
2024-10-22リリースのRaspberry Pi OS(Legacy, 32-bit)環境(Raspberry Pi 4使用)では、
問題なくインストールできることを確認しました。
エラーの原因は、指定したOpenCVのバージョンがRaspberry Piの環境(OSやPythonのバージョン)に対応していない可能性があります。
以下の手順で環境を最新に更新してみてください
1.システムの更新
sudo apt update && sudo apt full-upgrade -y
sudo reboot
2.Pythonおよびpipの更新
sudo apt install -y python3 python3-pip
sudo python3 -m pip install –upgrade pip
それでも解決しない場合は、OSの再インストールをご検討ください。
sudo apt install python3-opencvに関するエラーについては
何らかの理由でインターネット上のリポジトリ(raspbian.raspberrypi.org)にアクセスできない
ことが原因と思われますが、私の環境では正常にインストールできました。
import cv2を入力したら下記のエラーが出ました。全くの初心者で原因が分かりません。
RuntimeError: module compiled against API version 0xe but this version of numpy is 0xd
Traceback (most recent call last):
File “”, line 1, in
File “/usr/local/lib/python3.9/dist-packages/cv2/_init_.py”, line 5, in
from .cv2 import ”
ImportError: numpy.core.multiarray failed to import
>>>
ご指導よろしくお願いします。
ラズパイのモデルはModel3B+ Rev1.3
OSはRaspbian GNU/Linux 11 (Bulleseye)です。
返信が遅れてしまい、申し訳ございません。
numpyというライブラリーのバージョンの相性が悪いのかもしれません。
以下のコマンドを実行してから、再度import cv2を試してみてください。
pip3 install numpy –upgrade